-
日期: 2025-02-27 | 来源: 新智元 | 有0人参与评论 | 字体: 小 中 大
图2(b):数据筛选对有效吞吐量的影响
运动模式
通过线性重采样技术(即“运动模式”)加速策略执行,在提速不超过50%的范围内表现出奇地有效。这可能归功于动作输出块的高时间分辨率(200Hz)。
然而,当速度提高超过50%时,有效吞吐量开始大幅下降,因为动作变得过于不精确,系统需要频繁重置。
图3显示,在速度提高50%的情况下,策略能够实现比其训练所基于的专家轨迹更快的物体处理速度(T_eff>1)。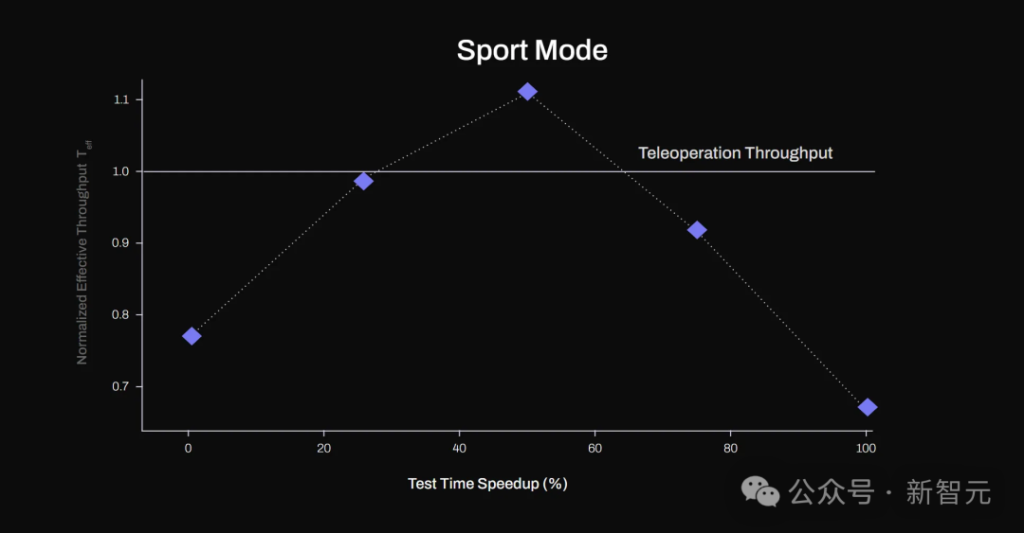
图3:通过动作块重采样实现测试阶段加速。在测试阶段速度提高50%的情况下,S1系统实现了比示范数据更高的有效吞吐量(T_eff>1)
跨机器人迁移
最后,通过利用学习型校准和视觉本体感知模块,Figure成功将最初仅在单个机器人数据上训练的策略应用到多台不同机器人上。
尽避各机器人间存在传感器校准差异和细微硬件不同,系统在所有平台上仍保持了相当一致的操作性能水平。
这种一致性凸显了学习型校准在减轻数据分布偏移方面的有效性,大大减少了繁琐的单机器人重新校准需求,使大规模部署变得更加实用。
总结
综上,Figure展示了如何通过高质量数据集,结合立体多尺度视觉、实时校准和测试阶段加速等架构优化,在实际物流优先级分拣场景中实现超越示范者速度的灵巧机器人操作――这一切仅使用了相对适量的示范数据。
研究结果表明,端到端视觉-运动控制策略在速度和精度至关重要的复杂工业应用中具有巨大的扩展潜力。- 新闻来源于其它媒体,内容不代表本站立场!
-
原文链接
原文链接:
目前还没有人发表评论, 大家都在期待您的高见