-
日期: 2025-03-10 | 来源: 极客公园 | 有0人参与评论 | 字体: 小 中 大
这时候,人形机器人的卡点,出现了新的变化――不在于智慧,在于动作能力上了。 在智慧能力出现突破之后,如果人形机器人的动作的泛化能力能够进一步突破,那么机器人的应用场景将有很大的扩展。
而在机器人的动作问题上,实际上则有两个分支。
一个是运动能力(locomotion),我们也可以简单理解为下肢动作。
一个是操作能力(manipulation),我们也可以简单地理解为上肢动作。
我们看到的宇树机器人,能打拳、能跳舞,其擅长的,正是机器人的「下肢能力」。而正如我们所看到的,虽然仍面临着承载力等一系列问题,机器人的「下肢能力」已经相对成熟。
而机器人的「上肢能力」则是完全另外的命题。
「四足平衡或者双足平衡,其实容错能力是比较好的。你一步踩错,它通过迅速的纠偏,通过一些算法其实可以迅速找回来的。但是泛化的抓拿和操控,容错很低。细微操作这件事情,大家目前还是相信要大量的数据进去才能够训练好这个事情。」戴若犁解释道。
图片来源:Figure 机器人官网
事实上,使用上肢进行灵巧操作,即使宇树机器人,也很难做到可以在现实中实用的地步。
宇树机器人在春晚的表演,使用的转手绢的动作,使用了一个取巧的战术――手绢是直接被固定在手部电机上进行高速转动的,只是用黑布遮挡,营造出「隐形」效果。其技术难点在于机器人关节扭矩更高(能够高速转动手绢)和其全身动作中的平衡,而并不在于机器人本身的手部动作灵敏到完全类人。
而想要机器人的上肢动作真正类人,业界通常认为,需要模仿学习――通过模仿人类的动作。而这意味着,需要大量的相关数据。
与无处不在的互联网数据相比,机器人的现存的相关数据则少得多。因此许多企业开始自建动作捕捉工厂,来为自家的机器人提供数据――也就出现了本文出现的新工作:卖动作给机器人的人。
这也带来了动作捕捉设备本身的爆火,据了解,截止到 2024 年年底,诺亦腾来自机器人领域的需求订单获得了超过六倍以上的增长。诺亦腾不但为机器人公司提供动作捕捉设备,也开始与不少厂商共建数据工厂,直接参与到具体的数据采集业务中。
03 采集数据的四象限
在招聘网站的调研中,笔者发现,虽然参与者做的任务都是类似的,招聘岗位的具体称呼却不同。
比如笔者试图面试的公司,就分出了「动作捕捉岗」和「仿真岗」两种不同的岗位。
笔者也就这两种岗位的不同,采访了戴博士。
戴若犁将目前获得数据的途径,按照是否采取动作是否由真人完成,采集的动作是否来自机器人本体等,分成了几个象限。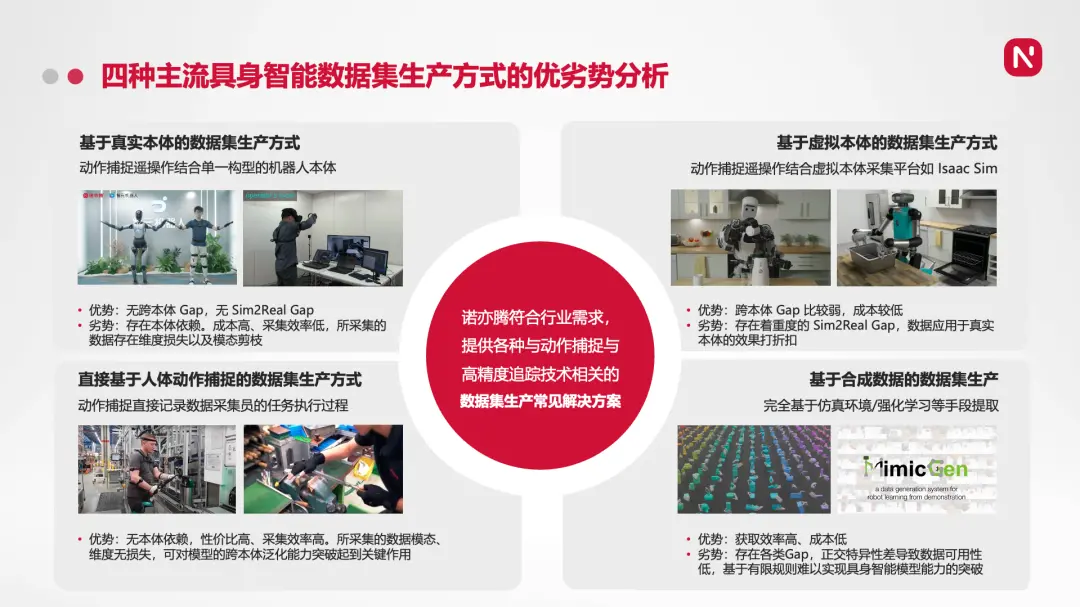
- 新闻来源于其它媒体,内容不代表本站立场!
-
原文链接
原文链接:
目前还没有人发表评论, 大家都在期待您的高见