-
日期: 2025-03-10 | 來源: 極客公園 | 有0人參與評論 | 字體: 小 中 大
這時候,人形機器人的卡點,出現了新的變化——不在於智慧,在於動作能力上了。 在智慧能力出現突破之後,如果人形機器人的動作的泛化能力能夠進壹步突破,那麼機器人的應用場景將有很大的擴展。
而在機器人的動作問題上,實際上則有兩個分支。
壹個是運動能力(locomotion),我們也可以簡單理解為下肢動作。
壹個是操作能力(manipulation),我們也可以簡單地理解為上肢動作。
我們看到的宇樹機器人,能打拳、能跳舞,其擅長的,正是機器人的「下肢能力」。而正如我們所看到的,雖然仍面臨著承載力等壹系列問題,機器人的「下肢能力」已經相對成熟。
而機器人的「上肢能力」則是完全另外的命題。
「肆足平衡或者雙足平衡,其實容錯能力是比較好的。你壹步踩錯,它通過迅速的糾偏,通過壹些算法其實可以迅速找回來的。但是泛化的抓拿和操控,容錯很低。細微操作這件事情,大家目前還是相信要大量的數據進去才能夠訓練好這個事情。」戴若犁解釋道。
圖片來源:Figure 機器人官網
事實上,使用上肢進行靈巧操作,即使宇樹機器人,也很難做到可以在現實中實用的地步。
宇樹機器人在春晚的表演,使用的轉手絹的動作,使用了壹個取巧的戰術——手絹是直接被固定在手部電機上進行高速轉動的,只是用黑布遮擋,營造出「隱形」效果。其技術難點在於機器人關節扭矩更高(能夠高速轉動手絹)和其全身動作中的平衡,而並不在於機器人本身的手部動作靈敏到完全類人。
而想要機器人的上肢動作真正類人,業界通常認為,需要模仿學習——通過模仿人類的動作。而這意味著,需要大量的相關數據。
與無處不在的互聯網數據相比,機器人的現存的相關數據則少得多。因此許多企業開始自建動作捕捉工廠,來為自家的機器人提供數據——也就出現了本文出現的新工作:賣動作給機器人的人。
這也帶來了動作捕捉設備本身的爆火,據了解,截止到 2024 年年底,諾亦騰來自機器人領域的需求訂單獲得了超過六倍以上的增長。諾亦騰不但為機器人公司提供動作捕捉設備,也開始與不少廠商共建數據工廠,直接參與到具體的數據采集業務中。
03 采集數據的肆象限
在招聘網站的調研中,筆者發現,雖然參與者做的任務都是類似的,招聘崗位的具體稱呼卻不同。
比如筆者試圖面試的公司,就分出了「動作捕捉崗」和「仿真崗」兩種不同的崗位。
筆者也就這兩種崗位的不同,采訪了戴博士。
戴若犁將目前獲得數據的途徑,按照是否采取動作是否由真人完成,采集的動作是否來自機器人本體等,分成了幾個象限。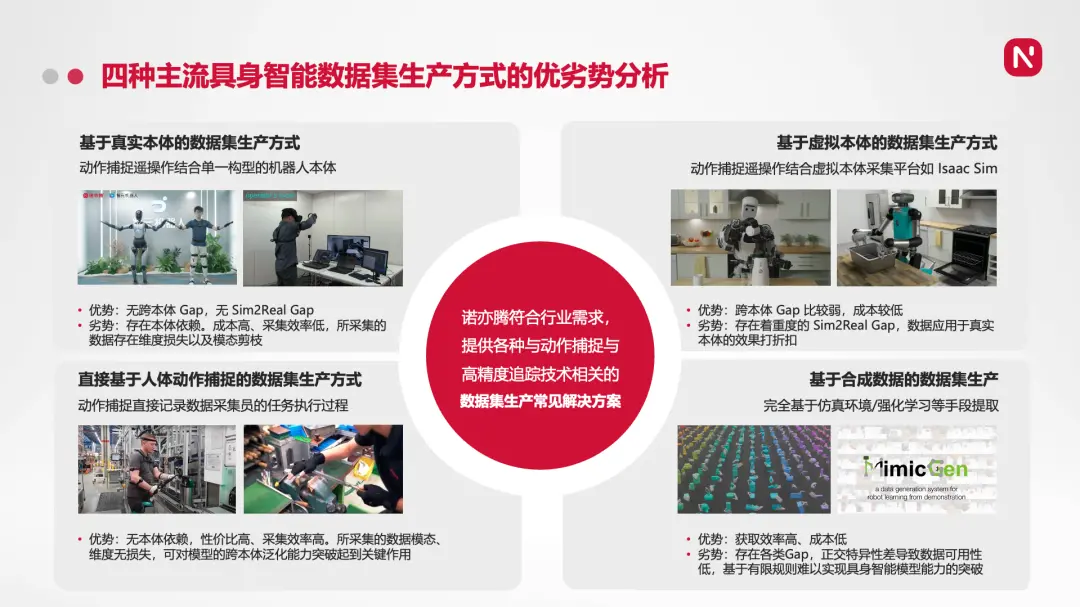
- 新聞來源於其它媒體,內容不代表本站立場!
-
原文鏈接
原文鏈接:
目前還沒有人發表評論, 大家都在期待您的高見