-
日期: 2025-03-10 | 来源: 极客公园 | 有0人参与评论 | 字体: 小 中 大
图片来源:诺亦腾
对于机器人训练而言,质量最高的数据,就是用遥操作采集的真实数据,也就是我看到的第一类型招聘的内容,被称为「动作捕捉岗」。
虽然使用的是动捕设备,但是实际上记录的数据,并不是穿着动捕设备的工作人员身上的动作,而是动捕设备操作的机器人的动作。
机器人成功进行了一次抓取,设备就会记录机器人胳膊的转角等等。因此这样的数据是质量最高的――数据直接从真实的机器人身上得到,甚至可以直接从你训练的这款机器人中得到,数据十分准确。
这也就是为什么这类的工作对工作人员的身高有要求:「如果是一个两米的人,但是机器人的胳膊只有一米六的人那么长,那么有可能出现机器人再往前够,我手已经没法再往前伸了的情况。」戴若犁表示。
图片来源:诺亦腾官网
在这类的工作中,采集数据的手段,也会有一些略微的差异。
一些采集采用工作人员在一旁观察机器人的动作的方式进行,是否成功直接由工作人员的肉眼判断。
而另一些招聘要求中则提到使用 VR 设备。这种采集通常是让操作机器人的人员,戴上 VR 眼镜,直接以机器人的视角进行观察 ――机器人本体上会存在视觉传感器,戴上 VR 眼镜的工作人员,相当于看到的就是机器能看到的状态,这时候再进行遥操作,又能记录下更多的数据。
遥操作的设备本身也不只有动作捕捉一种。 笔者接触到的另一个机器人公司,就自研了自己的外骨骼遥操作装置。操作人员在身上背上外骨骼,做动作,将动作传递到机器人身上。该机器人公司表示,这种框架下能记录到的关节转角更多。
去年 8 月, 特斯拉也传出要招聘员工进行机器人的数据采集,招聘岗位提到要求员工每天步行超过 7 小时,携带重达 30 磅(约 13.61 千克)的设备,并长时间佩戴 VR 头显。
戴若犁推测,很有可能就是穿上了外骨骼设备进行数据采集。纯动捕设备的话,全部加一块不会超过 4 公斤。另一种可能就是工作人员要采集非常多的全身动作,直接把采集数据的电脑背在身上了。
「虽然正常的走路动作,并不需要采集模仿学习的数据就能进行训练。但是到俯身、协同等动作的时候,人的重心是怎么动的,在一个动作中左右的重心是怎么分配的,如果能够获得数据,对于机器人的运控仍然是有参考意义的。」戴若犁表示。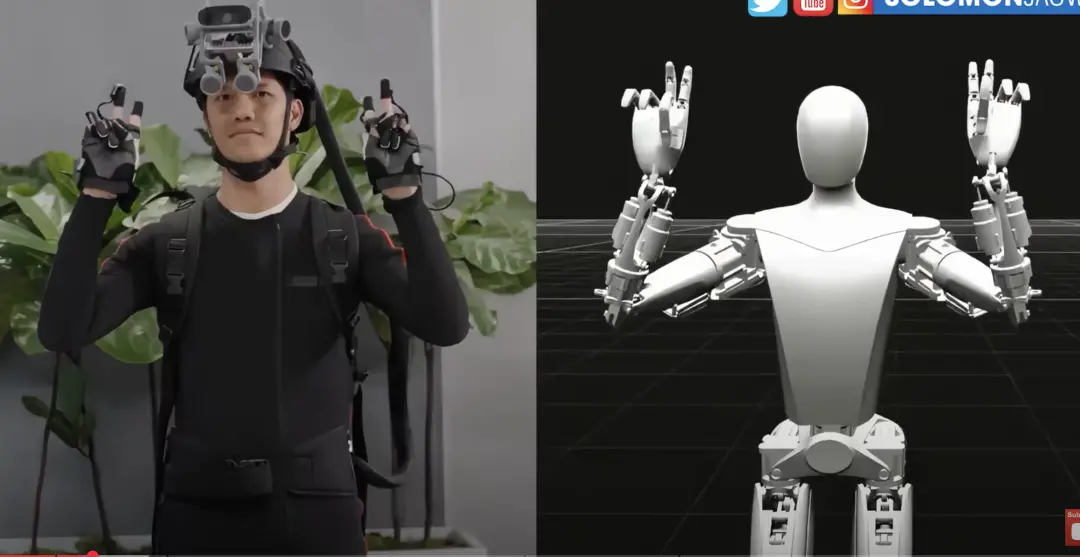
有新闻表示特斯拉的人形机器人利用 Xsens 动作捕捉系统进行训练 | 图片来源:Youtube- 新闻来源于其它媒体,内容不代表本站立场!
-
原文链接
原文链接:
目前还没有人发表评论, 大家都在期待您的高见