-
日期: 2026-02-11 | 來源: 電動車公社 | 有0人參與評論 | 專欄: 馬斯克 | 字體: 小 中 大
起初的規則算法,是嘗試讓輔助駕駛系統理解人類世界運行的邏輯,並嚴格執行。
如果理解有困難,就加上BEV“鳥瞰圖”、Occupancy“2D轉3D”、高精度地圖等各種技術,配上激光雷達和毫米波雷達的3D點雲數據,先讓它看清這個世界。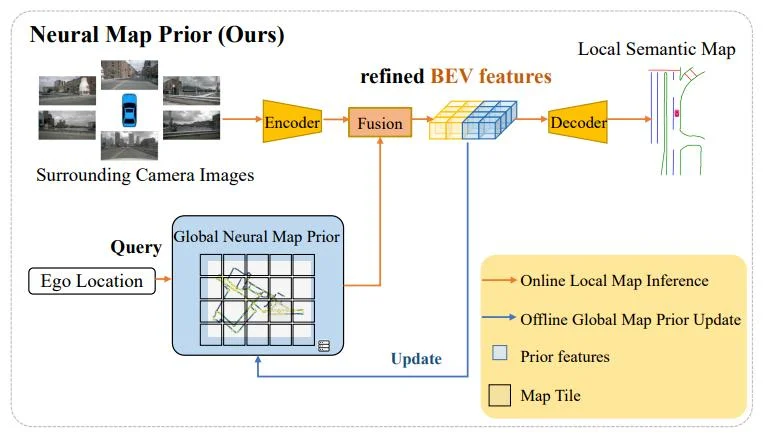
但規則算法,沒辦法窮舉所有的極端案例,並把這些寫進系統裡。算法越復雜,對算力的要求就越高;遇到沒見過的場景,還會突然懵逼、愣在原地。
所以,才出現了端到端算法和VLM大模型。
在這壹階段,輔助駕駛系統會觀察人類司機,模仿學習他們在遇到特殊情況下的操作,同時在每個時間點用人類語言解釋“遇到了什麼情況、為什麼要這麼做”。
這就有點像成千上萬個老司機手把手帶同壹個徒弟,事後還會復盤、反思、整改,學得非常快。
然而弊端是,身為“老司機合集”的它會繼承人類司機的壞習慣,也沒有真正理解背後的物理世界和交規的安全原則。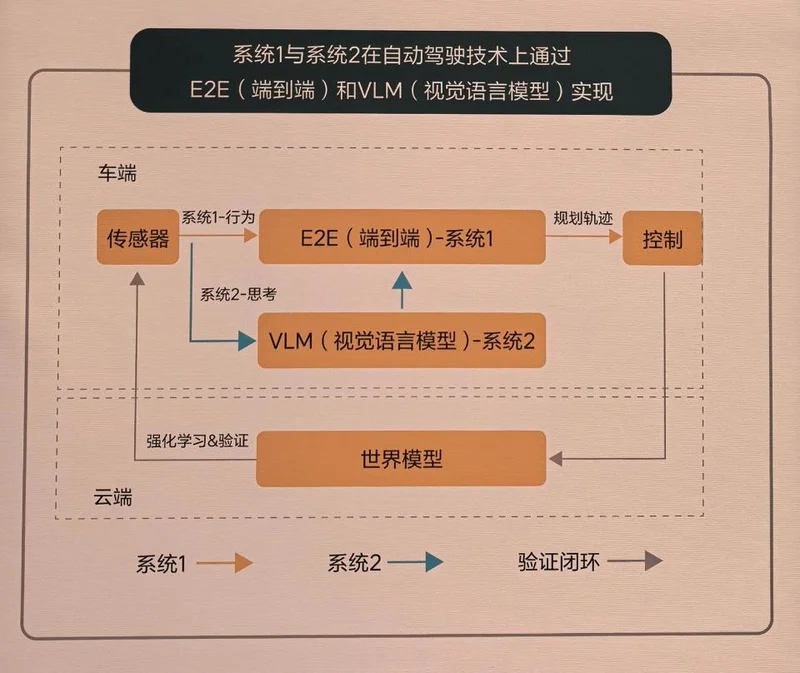
於是,VLA大模型和世界模型橫空出世,讓強化學習成了業界公認的主流方案。
從學習人類怎麼開車、到自己探索怎麼開車……只要數據夠多、模擬出的場景夠多,輔助駕駛系統就能在不斷的試錯中,找到適合的最優解。
但它的天花板,最多只是“最強老司機”。距離真正的自動駕駛,依然有很長的路要走。
要想做到L4,不只是“具備自動駕駛能力”,還要留出更多的冗余設計、驗證安全性和可靠性,還需要通過壹系列法規的考核。
在不久的將來,壹定會有新壹代的技術出現,推動輔助駕駛進壹步向自動駕駛發展。
至於這次的領頭羊還會不會是特斯拉?
那就要看中國品牌的進步速度,夠不夠快了。
這家最好!股市開戶分批買入大盤股指基金- 新聞來源於其它媒體,內容不代表本站立場!
-
原文鏈接
原文鏈接:
目前還沒有人發表評論, 大家都在期待您的高見