-
日期: 2024-01-05 | 來源: 新智元 | 有0人參與評論 | 字體: 小 中 大
壹般來說,開發通用機器人壹個非常有前途的方法是,從人類提供的演示中進行模仿學習。這種「行為克隆」可以讓機器人學習各種原始的技能,從簡單的拾放操作,到更精細的操作等等。然而,現實生活中許多任務,都需要全身協調的機動性,以及靈巧操作,而非單獨的移動或操作行為。這篇論文中,作者研究了將「模仿學習」擴展到需要雙臂移動機器人全身控制的任務可行性。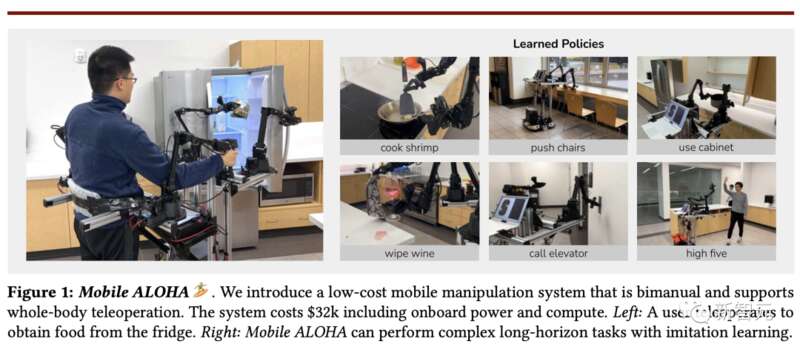
當前,有兩個主要因素阻礙了「模仿學習」在雙臂機器人移動操作中的廣泛應用。壹是,缺乏即插即用的「全身遠程操控硬件」。如果購買現成的,雙臂移動操作器成本會很高,比如PR2和TIAGo這樣的機器人價格超過20萬美元。為了在這些平台上實現遠程操控,額外的硬件和校准也是必要的贰是,之前的機器人學習研究中,尚未證明對於復雜任務的高性能雙臂移動操作。
在本文中,研究人員試圖解決將「模仿學習」應用於雙臂移動操作的挑戰。在硬件方面,作者引入了機器人Mobile ALOHA,壹個低成本的全身遙操作系統,用於收集雙臂移動操作數據。通過將其安裝在輪式底座上,Mobile ALOHA擴展了原始ALOHA的能力,即低成本和靈巧的雙人木偶操縱設置。然後,用戶將身體栓在系統上,反向驅動輪子,以便底座移動。當用戶雙手控制ALOHA時,底座可以獨立移動。研究人員同時記錄底座速度數據和手臂操縱數據,形成壹個全身遠程操控系統。
值得壹提的是,斯坦福團隊在打造Mobile ALOHA的所有成本僅用了3萬美元。在具體的機器人設計中,它們綜合考慮了肆個關鍵的因素:- 移動:系統的移動速度可與人類行走的速度相媲美,大約每秒1.42米。- 穩定性:當操作重型家用物品,如鍋和櫥櫃時,能夠保持穩定。- 全身遠程操控:所有自由度都可以同時遙操作,包括手臂和移動底座。- 不受束縛:機載電源和計算如下圖所示,可以清楚地看到Mobile ALOHA的技術規格。Mobile ALOHA有2個腕部攝像頭,和1個頂部攝像頭,並配有機載電源和計算。另外,遠程操作裝置可以拆除,Mobile ALOHA自主執行時只使用2個ViperX 300。兩只手臂的最低/最高高度分別為65厘米/200厘米,並從底座伸出100厘米。- 新聞來源於其它媒體,內容不代表本站立場!
-
原文鏈接
原文鏈接:
目前還沒有人發表評論, 大家都在期待您的高見