-
日期: 2024-01-05 | 來源: 新智元 | 有0人參與評論 | 字體: 小 中 大


硬件得到了,接下來便是使用數據進行協同訓練。論文中,研究人員使用壹個協同訓練管道,利用現有的靜態ALOHA數據集,以改善模仿學習在移動操作,特別是雙手臂操作的性能。靜態ALOHA數據集總共有825個演示任務,包括密封袋子、拿起叉子、包裝糖果、撕紙巾、打開帶蓋塑料杯、玩乒乓球、使用咖啡機、翻轉鉛筆、固定魔術貼電纜、裝上電池和操作螺絲刀。然後,研究人員選擇了7個任務,讓Mobile ALOHA去完成。對於機器人需要清理灑在桌子上紅酒的任務,需要機動性和雙手靈活性。具體來說,機器人需要首先導航到水龍頭,拿起毛巾,然後導航回到桌子。然後壹只手臂舉起酒杯,另壹只手臂需要用毛巾擦拭桌子和杯底。這個任務在靜態ALOHA中是不可能完成的,單臂移動機器人需要更多的時間來完成。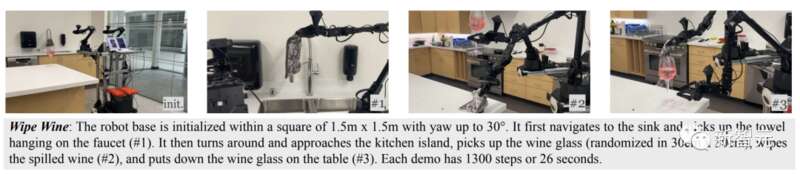
對於炒蝦仁來說,機器人需要將壹個生蝦兩面煎熟,然後把它放進碗裡。機動性和雙手靈活性也是這項任務的必要條件:機器人需要從灶台移動到廚房台,用鏟子翻動蝦仁,而另壹只手臂還需傾斜平底鍋。這項任務要求比擦酒精度更高,因為翻轉半熟的蝦需要更高的精度。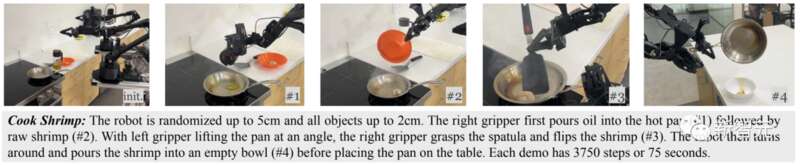
- 新聞來源於其它媒體,內容不代表本站立場!
-
原文鏈接
原文鏈接:
目前還沒有人發表評論, 大家都在期待您的高見