-
日期: 2024-02-11 | 來源: 經濟日報 | 有0人參與評論 | 專欄: 深夜八卦 | 字體: 小 中 大
此外,在工廠生產線抓住物品移動的機器人手臂,進步神速。現有的高性能機器人手臂使用攝影機,以光學辨識物體並且挑揀。不過攝影機不擅長辨識透明或鏡面的物品,也有很大的死角,因此精准度不夠高。可解決這些課題的是,紅外線感測器和AI壹起偵測的“近接感測器 TK-01”。它的正確性微細到0.1公釐,以非接觸方式感測,而且動作非常纖細,因此也適用於非常精巧的物品。而且通常要驅動壹般的機器人手臂,必須設計程式,並且讓它讀取“學習”,但近接感測器可以大幅減少這些作業,也有助於降低成本。
靈感來自生物的“人工肌肉”,也是日本領先世界的領域之壹。人工肌肉的結構是,把空氣送進橡膠軟管,借此產生收縮力,成為機器人的動力。因為是空氣壓縮方式,防爆性高,在處理危險品的工廠等處,需求非常高。
中央大學理工學部教授中村太郎開發的“軸向纖維強化型人工肌肉”,和全球普及的“McKibben(氣動)型人工肌肉”相比,力量達到4倍以上,在業界引起討論。使用這種人工肌肉的機器人“Sooha”已經進入實用階段,它的特征是像蚯蚓壹樣蠕動,能在狹窄的空間內自己行進,因此能檢查人類或機器人以往進不去、結構復雜的纖細管道內。
人工肌肉還有壹個優點是,因為內部是空心,除了攝影機,裡面可以放各種感測器或清掃用具等。在日本,1970~80年代興建的基礎建設,如今都面臨老化問題,Sooha可望成為解決對策之壹。
4.有人工肌肉的機器人(關鍵科技)
圖為SoLARIS的Sooha,像蚯蚓壹樣蠕動,檢查微細的管線。軟體機器人可以柔軟而流暢地動作,日本領先全世界。從生物得到靈感,而開發出人工肌肉,可以做以前機器人辦不到的事。
由NASA主導的“阿提米絲登月計劃”正在進行,日本的機器人也參與其中。東京大田當地工廠催生的“YAOKI”,原本預定2023年內要發射升空,探測月球表面。負責人是開發奧迪汽車肆輪傳動系統“quattro”的中島紳壹郎,他在設計時運用到相關的想法。
YAOKI的特征是可以行駛在崎嶇不平的路上,還能負重100G(重力單位),而它的重量只有498公克。運送到月球的成本壹般是“1公斤1億日圓”,愈輕就愈能降低成本。月球表面還有很多謎團待解,不久後日本的制造技術就可望發光發熱。
5.月球表面探測漫游車(關鍵科技)
為了2028年開始正式興建月球表面基地,目前正在做探測的准備。地方工廠推動的超小型漫游車,目標瞄准太空。
圖為Dymon的YAOKI。在月球表面到處走,搜集資訊。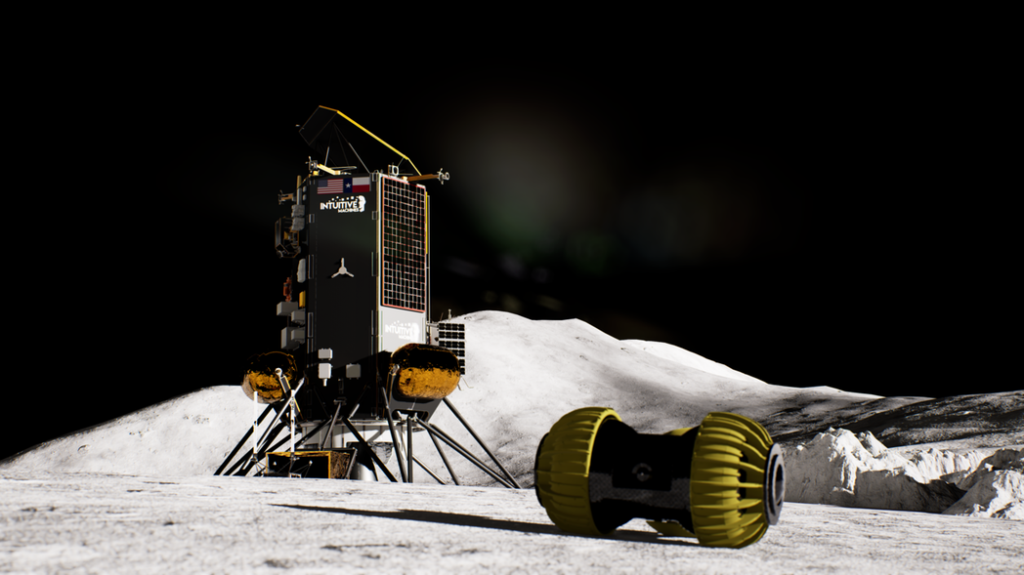
6.工作人型機器人- 新聞來源於其它媒體,內容不代表本站立場!
-
原文鏈接
原文鏈接:
目前還沒有人發表評論, 大家都在期待您的高見