-
日期: 2024-03-26 | 來源: 新智元 | 有0人參與評論 | 字體: 小 中 大
因此,我們就看到了Cassie的各種運動技能。比如穩穩地站立,多才多藝地步行,快速跑步,以及各種跳高和跳遠。
這個研究所基於RL的控制器架構如下圖,它利用了機器人的輸入和輸出(I/O)的雙重歷史記錄。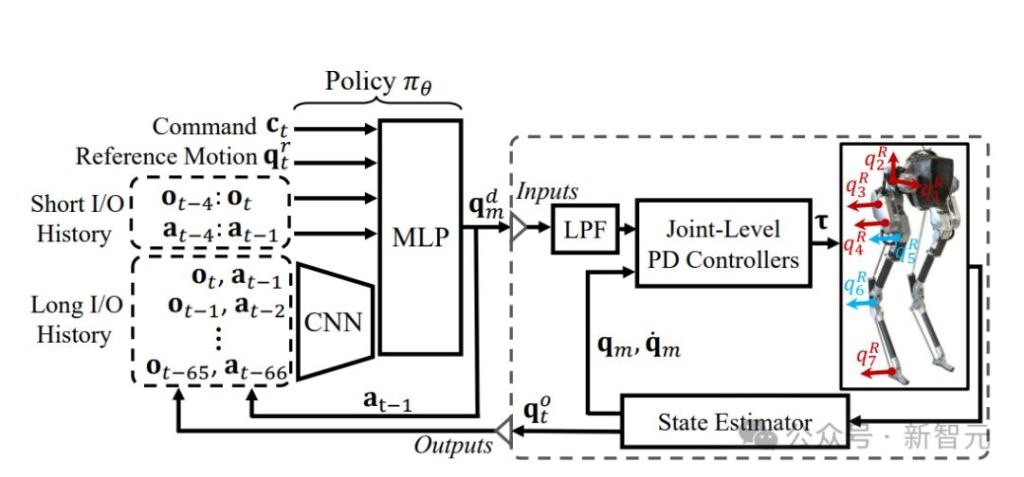
利用這個多階段的訓練框架,就可以獲得零樣本轉移到現實世界的通用控制策略。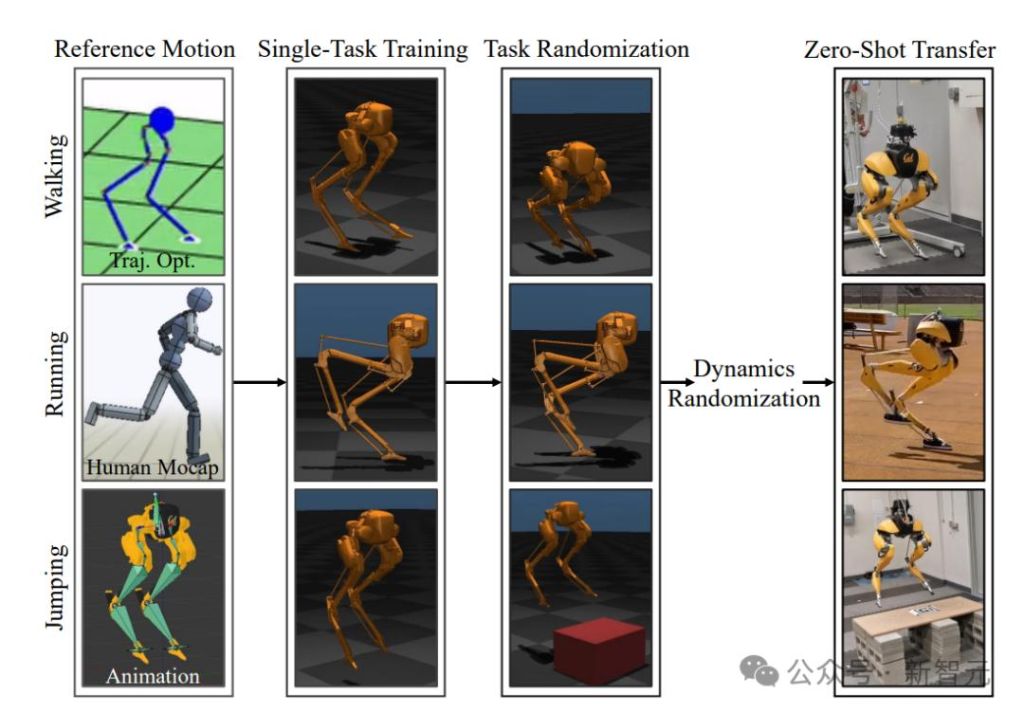
如下是基於RL的雙足機器人運動控制策略架構各種基線的圖示。
利用研究者開發的多功能跑步策略,Cassie成功完成了400米沖刺。
這個過程是使用單壹跑步策略完成的。
它使得機器人能夠從站立姿勢轉變為平均2.15m/s和峰值3.54m/s的快速跑步步態。
- 新聞來源於其它媒體,內容不代表本站立場!
-
原文鏈接
原文鏈接:
目前還沒有人發表評論, 大家都在期待您的高見